一、项目名称:智能魔方机器人 指导教师:李珉
项目负责人:王元吉 项目成员:张继嵩(启明学院) 柳泽旭 何嘉明(启明学院)王菱
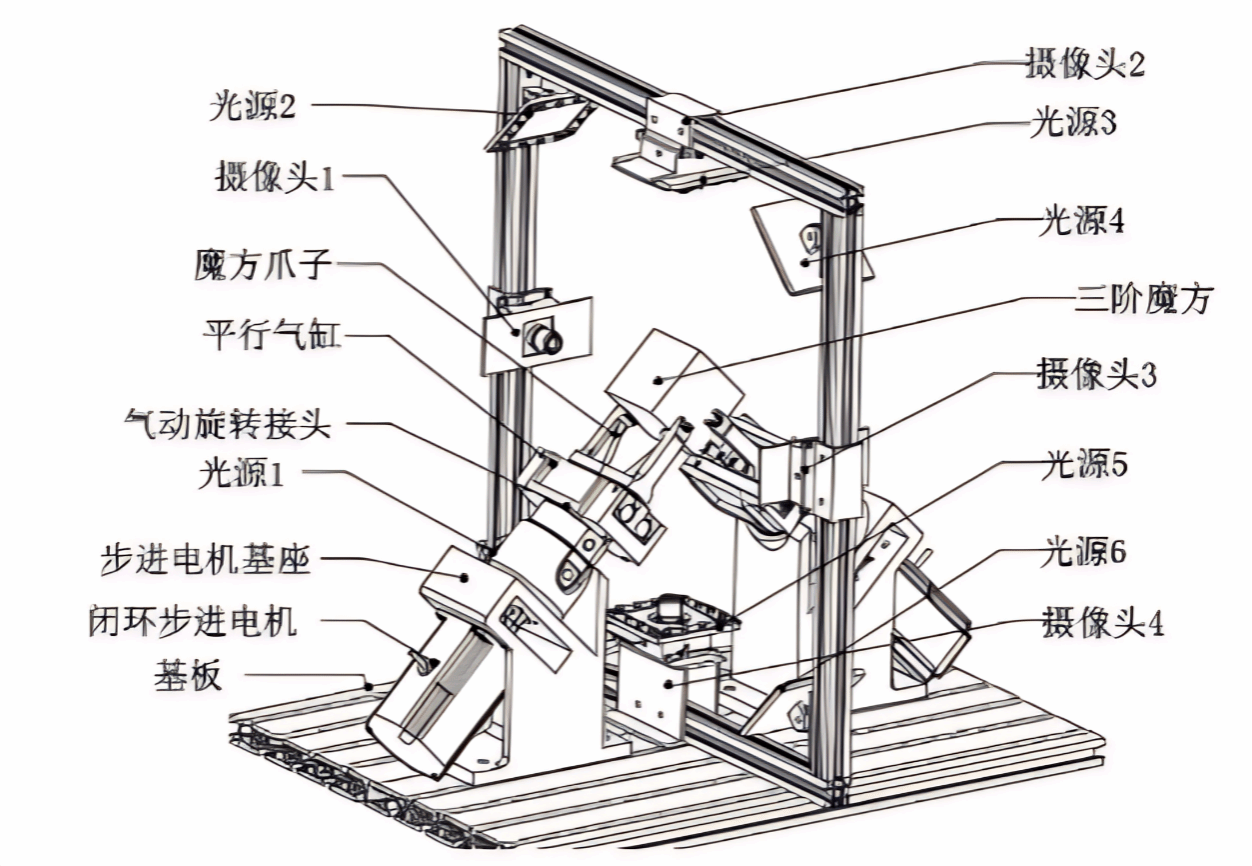
智能复原魔方机器人是融合机械工程、人工智能与自动化技术的智能设备,专为高效精准复原各类魔方设计。其核心由高精度机械臂、视觉识别模块与智能算法构成,通过摄像头快速捕捉魔方色块分布,经算法秒级解析最优复原路径,再由机械臂按预设轨迹完成旋转操作,最快可在数秒内复原三阶魔方。该机器人支持 2 阶至 7 阶及异形魔方,适配不同难度场景,兼具学习与娱乐价值。作为工科技术应用的典型载体,其机械结构设计、视觉识别逻辑与路径规划算法,可直观呈现自动化控制、机器视觉等核心技术,既是趣味科技产品,也是高校课程设计、创新项目的优质研究对象,为工科学习与技术实践提供了生动的实物案例
二、项目名称:自动木材切割成型设备 指导教师:李珉
项目负责人:黄东霖 项目成员:金禹龙 郭锦洋 欧阳昊林(启明学院)
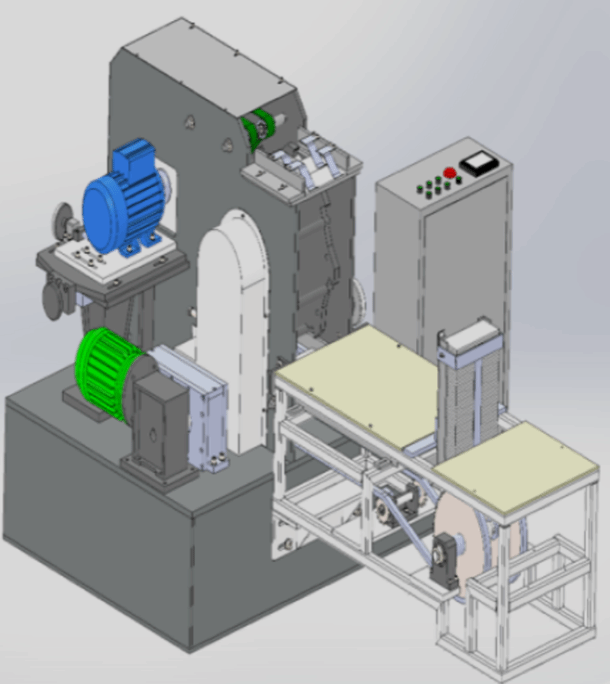
常智宁自动木材切割成型设备是木工加工领域的智能化核心装备,融合机械设计、数控技术与自动化控制,实现木材从原料到成品的高效精准加工。设备搭载高精度伺服电机、智能数控系统与激光定位模块,通过预设 CAD 图纸参数,自动完成切割、开槽、雕刻等多道工序,误差可控制在 0.1mm 以内。
其适配实木、板材、密度板等多种材质,支持定制化造型加工,广泛应用于家具制造、建筑装修、工艺品生产等场景。相比传统人工加工,该设备不仅将生产效率提升 3-5 倍,还能减少材料浪费,降低人工成本。同时,设备具备操作简单、安全稳定的特点,是现代木工行业实现自动化、规模化生产的关键装备。
三、项目名称:基于STM32的智能水质检测系统 指导教师:李珉
项目负责人:隋兴硕 项目成员:张帆 王劲皓 王偌宇 乔金珠(启明学院)
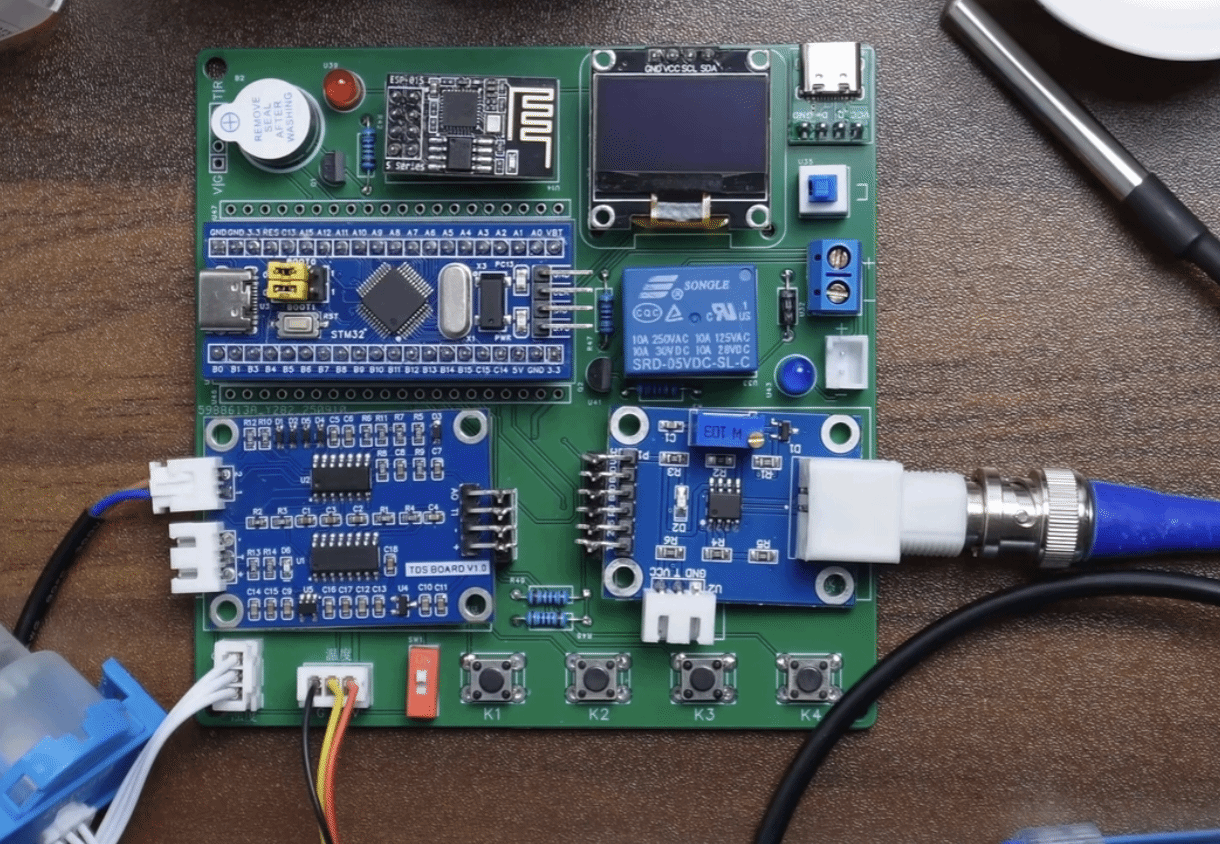
该系统以STM32单片机为核心控制单元,融合传感器技术、数据传输与智能处理功能,实现水质多参数精准检测。系统搭载pH值、溶解氧、浊度、电导率等高精度传感器,实时采集水体关键指标,经STM32芯片快速处理与数据校准后,通过LCD显示屏本地显示检测结果。 同时支持蓝牙/WiFi无线通信,可将数据上传至手机APP或云端平台,便于远程监控与历史数据追溯。系统具备阈值报警、数据存储等功能,适配饮用水、水产养殖、环境监测等多场景。其硬件电路集成度高、功耗低,软件算法优化了检测精度与响应速度,兼具成本可控与操作便捷的优势,是物联网技术在水质监测领域的典型应用,为水质安全监管提供高效解决方案。
四、项目名称:农业检测装置 指导教师:李珉
项目负责人:杜浩洋(启明学院) 项目成员:余哲杭(启明学院) 谭俊辉(启明学院) 郭书涵 赵婉悦
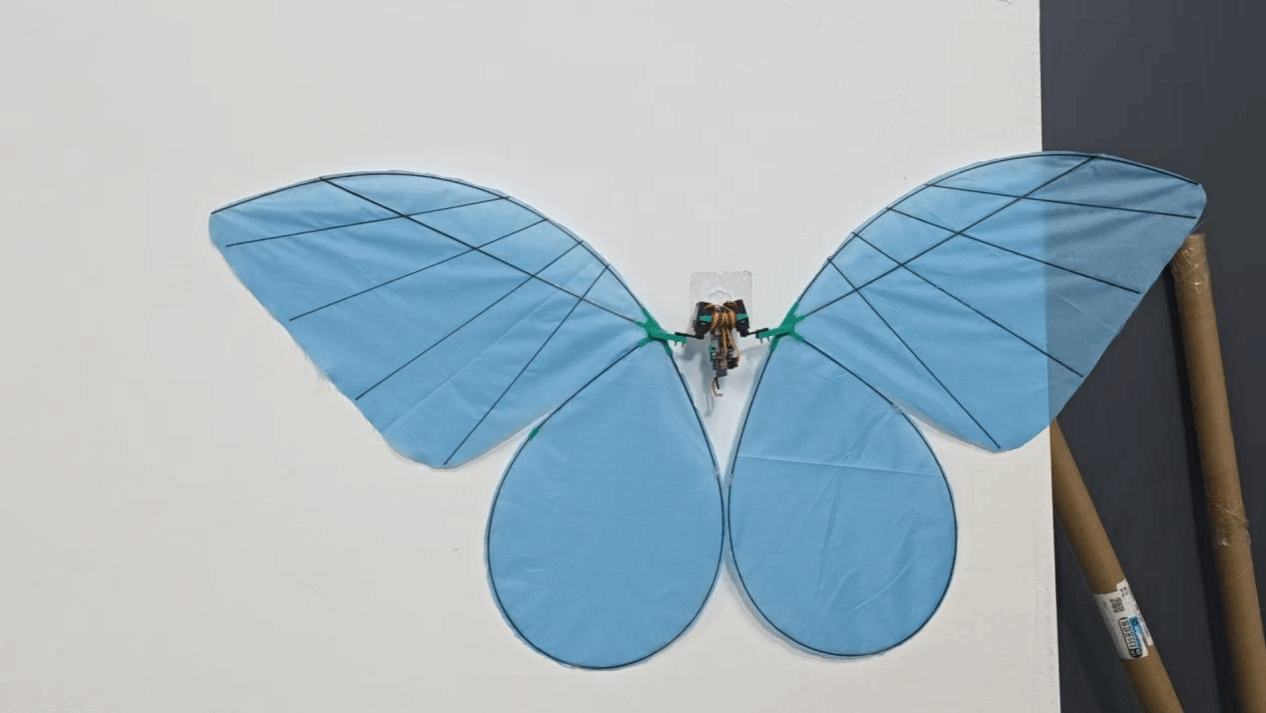
本仿生蝴蝶飞行机器人实施计划围绕动力系统、控制系统与图像采集系统三大核心模块展开,实现了仿生机理与智能技术的融合应用。动力系统采用电机与齿轮组联动驱动双翅的机械结构,通过精妙的机械设计精准控制摆臂幅度,从而获取充足起飞升力,达成较大升重比,为机器人的飞行提供了可靠动力支撑,复刻了蝴蝶振翅的动力学特性。控制系统依托集成电路与视觉反馈技术,使机器人具备精准定位、自主飞行与智能避障能力,全面负责飞行器的飞行稳定、导航规划及作业控制,保障其在复杂环境中也能稳定执行任务,实现了智能化的飞行管控。图像采集系统则搭载树莓派外接摄像头模块,可在空对农作区域开展日常监控,实时回传农作物生长情况,大幅提升农业巡检的工作效率,推动农业监测向智能化迈进。三大系统协同运作,让该仿生蝴蝶飞行机器人在农业智能监控等场景中展现出独特优势,既凭借仿生结构实现高效飞行,又通过智能控制与图像采集技术完成智能化作业,为小型化、智能化飞行机器人的实用化发展提供了可行路径。
撰稿:陈 征
初审:李 珉
复审:孙慧洁
终审:王元松

 公众号
公众号